A.6 Anuloidová
soustava
V tomto případě také nebudeme uvádět úplný popis všech vztahů a operátorů, i s ohledem na to, že daná soustava je příliš specifická
, resp.
týká se pouze jednoho typu geometrického tělesa, tzv. anuloidu (toroidu) – viz obrázek A.5 (popis soustavy rovněž odkazuje k příkladům
6.47 a 6.58). Ukážeme pouze, jak je možné flexibilně adaptovat principy, odvozené pro předchozí univerzální
geometrické systémy
na (v podstatě jakýkoli) speciální případ.
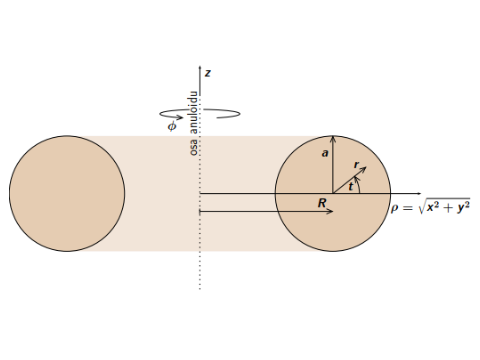
Anuloidem nazýváme těleso, které vznikne rotací kružnice okolo osy, která leží v rovině této kružnice a nemá s ní společný bod (vznikne tak válcově symetrická trubice - torus, připomínající duši pneumatiky
).
Označíme-li $R$ poloměr osy toru, $a$ poloměr trubice (toru), $r$ radiální vzdálenost uvnitř trubice vzhledem k ose trubice, $t$ úhlovou souřadnici vnitřku trubice a značení ostatních směrů bude odpovídat standardní cylindrické notaci, tj. $\rho$ bude odpovídat radiální vzdálenosti od osy celého anuloidu, $\phi$ bude azimutální úhel anuloidu a $z$ vertikální souřadnice (vše je vyznačené v obrázku A.5), můžeme za anuloidové (proměnné) souřadnice považovat $r,\phi,t$ (v pravotočivém smyslu). Transformační vztahy můžeme zapsat následovně,
Vztahy pro zpětnou transformaci budou mít v tomto případě tvar
Kovariantní metrický tenzor $g_{ij}$ a příslušné Laméovy koeficienty anuloidové souřadné soustavy budou,
Vzhledem k tomu, že jde o diagonální metriku, bude kontravariantním metrickým tenzorem $g^{ij}$ zpětné transformace rovněž tenzor s převrácenými hodnotami prvků na hlavní diagonále. Jakobián souřadnicové transformace z kartézské do anuloidové soustavy tedy bude
jakobiánem zpětné transformace bude opět výraz $J^{-1}$. Ostatní parametry lze snadno odvodit analogickým způsobem jako v předchozích soustavách.