| Měřené veličiny GPS | Podstata metod pro určení polohy s GPS |
Kromě náhodných chyb lze rozlišit celou řadu systematických, jejichž odstranění přispívá ke zvýšení přesnosti určování polohy.
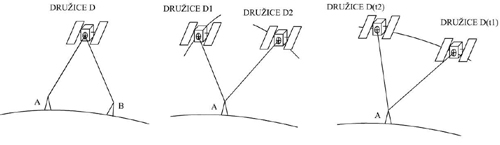
Princip diferenci je v tom, že se nesnažíme o měření absolutní polohy, ale o určení polohy relativní, vztažené obyčejně k bodu jehož souřadnice známe (vlícovací bod). Diference můžeme v zásadě získat třemi způsoby:
Diferecniální měření s výhodou eliminují atmosférické chyby. Jsou-li body blízko sebe (polohově, či časově), tak signál musí procházet takřka identickou částí atmosféry, což sice neumožňuje přesné zjištění polohy absolutní, ale můžeme s velkou přesností určit rozdíly v poloze mezi dvěma body.
Signál je rušen zejména ve dvou vrstvách atmosféry - Ionosféra (obsahuje volné ionty - je elektricky aktivní) a Troposféra
Je zavíslá na hustotě elektronů v jednotce objemu. Její vliv je kvantifikovám v rozmezí 0,15-0,5m. Efektivní způsob jak inosférickou refrakci odstranit je difeneciální měření, protože hustota elektronů v ionosféře se mění kontinuálně a pro dva blízké body má takřka neměnou hodnotu.
Troposférická refrakce se ovlivňována změnami atm.tlaku, vlhkosti a teploty. Vzorce pro modelování tropos.refrakce byly získány empiricky, mezi nejpoužívanější patří vzorec Saastamoinenův apod. Také vliv troposférické refrakce se odstraní pomocí diferenciálního měření.
Vycházejí ze vztahů teorie relativity, v praxy však mají oproti jiným chybám menší význam s jednou vyjímkou. Významným prvkem ovlivňujícím přesnost je Dopplerovský efekt, který mění v závislosti na rychlosti frekvenci elmag. vlnění.
| Dopplerovský efekt působící změnu frekvence GPS | |
|---|---|
| f´= f / (1-v2/c2)1/2 | |
| kde: | |
| f´ | nová frekvence |
| f | původní frekvence |
| v | vzájemná rychlost přijímač-družice |
Rychlost vysílače vůči přijímači (čím vetší bude vektor vzájemné rychlosti, tím větší vliv to bude mít na změnu frekvence)