[Další] [Předchozí] [Předchozí – na konec] [Na konec] [Výše]
Zde se využití počítače přímo nabízí. Tato část matematické analýzy se probírá v době, kdy nejsou probrány odpovídající partie z geometrie (zimní semestr druhého ročníku učitelského studia). Studenti proto často postrádají geometrickou představu v prostoru, a tak jsou visualizační schopnosti počítačových systémů velmi vítány.
Všimněme si podrobněji problematiky tvorby grafů reálné funkce dvou reálných proměnných pomocí programu Maple V. Zaměříme se zejména na případy, kdy počítačem získaný výstup (v dalším nazývaný PC-graf), neodpovídá grafu funkce (Definice 1.2 ).
Definujme funkci f(x,y) =
sin(x)cos(y):
> f:=(x,y)->sin(x)*cos(y);
a sestrojme PC-graf funkce f (obr. 10.1
):
> plot3d(f, -Pi..Pi, -Pi..Pi);
Stejně jednoduše je možno získat i PC-graf plochy
dané parametricky, např. x
= sinucosv,
y = sinusinv,
z = cosu,
u  [0,
p], v
[0,2p] (obr. 10.2):
[0,
p], v
[0,2p] (obr. 10.2):
> with(plots):
> plot3d([sin(u)*cos(v),sin(u)*sin(v),cos(u)],u=0..Pi,
> v=0..2*Pi,style=patch, scaling=constrained,
> axes=framed, labels=[x,y,z]);
Parametrem scaling=constrained jsme dosáhli stejného
měřítka na osách výsledného PC-grafu. Porovnejme PC-graf na
obrázku 10.2
s PC-grafem na
obrázku 10.3
, na kterém je tatáž koule generovaná
bez použití tohoto parametru:
> plot3d([sin(u)*cos(v),sin(u)*sin(v),cos(u)],u=0..Pi,
> v=0..2*Pi,style=patch, axes=framed, labels=[x,y,z]);
Jakým způsobem probíhá konstrukce PC-grafu?
Zadáme funkční předpis a množinu bodů [x,y],
pro které chceme funkci zobrazit. Tato množina je typu  xmin,xmax
xmin,xmax
 ymin,ymax. Na ní pak program vytvoří síť,
v jejichž uzlových bodech numericky spočítá funkční hodnoty
(tyto jsou uloženy do objektu PLOT3D). Hustotu sítě regulujeme pomocí
parametru grid=[m,n], kde m a n
udává počet uzlových bodů ve směru os x a y.
Implicitní nastavení tohoto parametru je [25,25]. Funkční hodnoty jsou poté
podle interpolačních pravidel pospojovány a PC-graf zobrazen na
výstupním zařízení.
ymin,ymax. Na ní pak program vytvoří síť,
v jejichž uzlových bodech numericky spočítá funkční hodnoty
(tyto jsou uloženy do objektu PLOT3D). Hustotu sítě regulujeme pomocí
parametru grid=[m,n], kde m a n
udává počet uzlových bodů ve směru os x a y.
Implicitní nastavení tohoto parametru je [25,25]. Funkční hodnoty jsou poté
podle interpolačních pravidel pospojovány a PC-graf zobrazen na
výstupním zařízení.
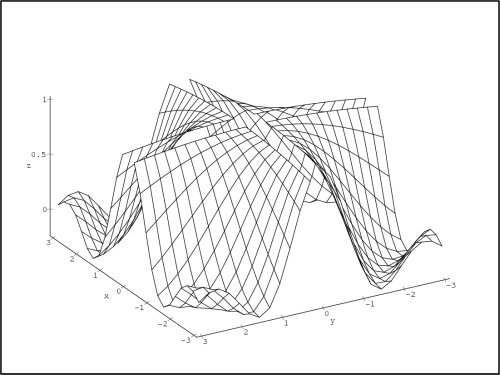
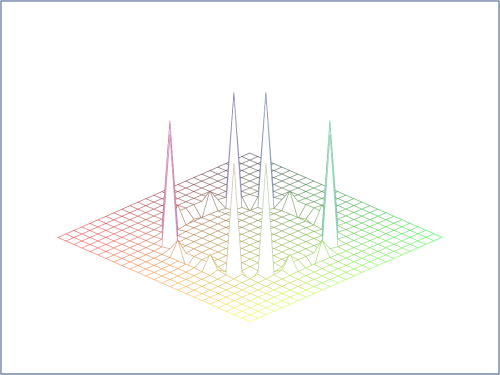
Tento postup však zřejmě může vést
k zavádějícím výsledkům. Pro ilustraci např. vytvořme PC-graf
funkce g(x,y) =
sin(2px)sin(2py), pro
x a y z intervalu 0,25 beze změny
implicitního nastavení parametrů:
> plot3d(sin(2*Pi*x)*sin(2*Pi*y), x=0..25, y=0..25,
> axes=boxed, labels=[x,y,z]);
Podrobnější analýzou zadané funkce však
zjistíme, že získaný PC-graf (obr. 10.4
) neodpovídá skutečnosti, funkce
sin(2px) a
sin(2py) jsou
periodické s periodou 1 a tomu PC-graf na
obrázku 10.4
neodpovídá. Zhuštěním sítě dostáváme
výsledek bližší skutečnému chování uvažované funkce
(obr. 10.5
):
> plot3d(sin(2*Pi*x)*sin(2*Pi*y), x=0..25, y=0..25,
> axes=boxed, grid=[60,60], labels=[x,y,z]);
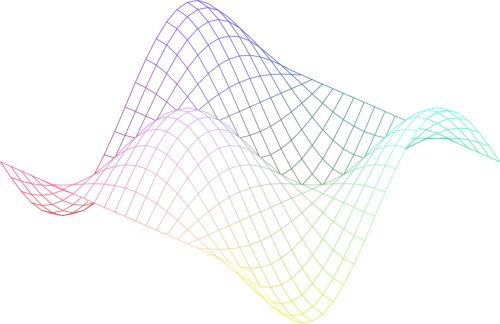
Další problémy vznikají při tvorbě grafů nespojitých funkcí. Nejjednodušší situace nastává v případě, kdy studovaná funkce není v bodě [x0,y0] spojitá (viz Definice 2.3 ), ale v tomto bodě existuje konečná limita. Pak můžeme buď změnit hustotu uzlových bodů nebo funkci vhodným způsobem dodefinovat.
Příklad 10.1. Vytvořte PC-graf funkce

zadáme funkci a příkazem:
> plot3d(f, -3..3, -3..3, orientation=[-57,38],
> axes=framed, labels=[x,y,z]);
získáme PC-graf zobrazený na obr. 10.6 .
Bod, ve kterém vyšetřovaná funkce není spojitá,
je při této hustotě sítě totožný s uzlovým bodem a program
v něm nemůže spočítat funkční hodnotu. Při zobrazování na
výstupním zařízení je funkční hodnota v bodě nespojitosti
vynechána a zobrazený PC-graf neodpovídá v okolí bodu
[0,0]
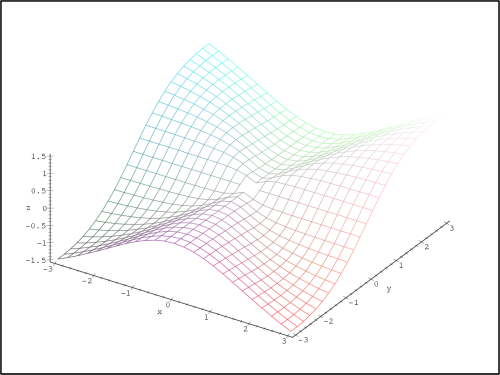
grafu funkce. Všimněme si u tohoto příkladu podrobně struktury
Mapleovské grafiky. Generujme graf zkoumané funkce
pro x a y z intervalu −3,
3 při hustotě sítě [7,7] a
podívejme se, jaká je struktura vytvořeného objektu PLOT3D:
> p:=plot3d(f, -3..3, -3..3, orientation=[-57,38],
> axes=framed,grid=[7,7],color=black,labels=[x,y,z]);
> p;
![p := PLOT 3D(GRID( − 3...3.,− 3...3.,[[− 1.500000000000000, − 1.384615384615385, − .9000000000000000, 0, .9000000000000000, 1.384615384615385,1.500000000000000] ,[− .9230769230769231,− 1.,− .8000000000000000,0, .8000000000000000, 1.,.9230769230769231],[ − .3000000000000000, − .4000000000000000, − .5000000000000000, 0,.5000000000000000, .4000000000000000, .3000000000000000], [0,0,0,FAIL, 0,0,0 ],[− .3000000000000000, − .4000000000000000, − .5000000000000000, 0, .5000000000000000, .4000000000000000,.3000000000000000] ,[− .9230769230769231,− 1.,− .8000000000000000,0, .8000000000000000, 1.,.9230769230769231],[ − 1.500000000000000, − 1.384615384615385, − .9000000000000000, 0,.9000000000000000, 1.384615384615385,1.500000000000000]], COLOR( RGB, 0,0,0)),AXESLABELS( x,y,z),TIT LE( ), AXESST Y LE( F RAM E ),P ROJ ECT ION (− 57.,38.,1))](diferencialni-pocet1088x.png)
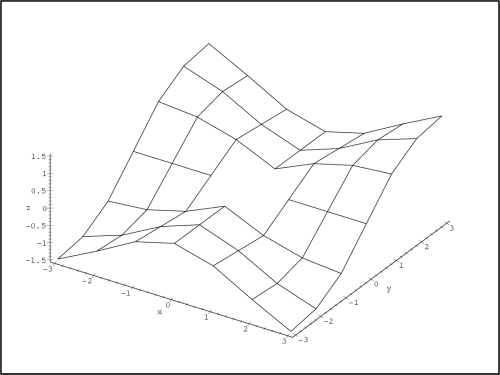
Změníme tedy hustotu uzlových bodů tak, aby
bod [0,0] (bod
nespojitosti) nebyl uzlovým bodem (obr. 10.8):
> plot3d(f, -3..3, -3..3, orientation=[-57,38],
> axes=framed, grid=[30,30], labels=[x,y,z]);
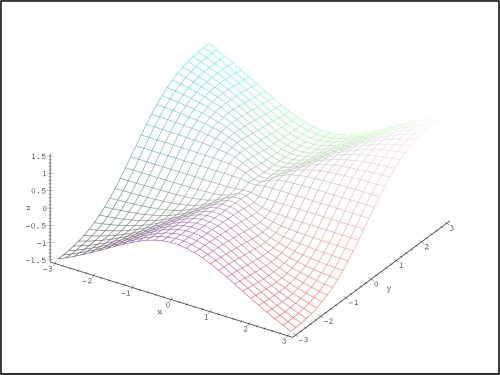
Jinou možností je dodefinovat funkční hodnotu
v bodě [0,0] tak,
aby funkce f v tomto bodě
byla spojitá. Poté generujme PC-graf získané spojité funkce:
> g:=proc(x,y) if x=0 and y=0 then 0
> else (x^2*y)/(x^2+y^2) fi end:
> plot3d(g, -3..3, -3..3, orientation=[-57,38],
> axes=framed, labels=[x,y,z]);
Obdržíme výsledek znázorněný na obr. 10.9 .
Příklad 10.2. Funkce

dostáváme PC-graf na obrázku 10.10. Zde jsou opět patrné nespojené body, ve kterých výpočet funkčních hodnot „havaroval“ (body nespojitosti na osách x a y opět vycházejí do uzlových bodů sítě).
Vytvořme tedy PC-graf spojité funkce (obr. 10.11 ) (dodefinujme funkci tak, aby byla spojitá)

> plot3d(g, -3..3, -3..3, axes=framed,
> orientation=[150,50], color=black, labels=[x,y,z],
> tickmarks=[7,7,3]);
Jinou možností je opět vhodně změnit hustotu sítě tak, aby body nespojitosti nebyly totožné s uzlovými body sítě.
Pokud v bodech nespojitosti neexistuje konečná limita, je znázornění chování takové funkce pomocí počítače obtížnější.
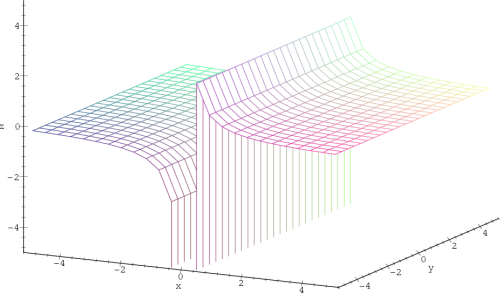
Příklad 10.3. Generujte PC-graf funkce f(x,y) =
1∕x.
Protože limx 0+1∕x
= +
0+1∕x
= + , limx0−1∕x
= −, není funkce f na přímce x = 0
spojitá. Příkazem:
, limx0−1∕x
= −, není funkce f na přímce x = 0
spojitá. Příkazem:
> plot3d(1/x, x=-5..5, y=-5..5, orientation=[-63,73],
> axes=framed, labels=[x,y,z]);
dostáváme PC-graf z obr. 10.12.
Vidíme, že PC-graf neodpovídá grafu zkoumané
funkce. Podívejme se opět na objekt PLOT3D, pro zjednodušení zvolme grid=[7,3] (obr. 10.13):
> p:=plot3d(1/x, x=-5..5,y=-5..5,orientation=[-63,73],
> axes=framed,grid=[7,3],color=black,labels=[x,y,z]);p;
![p := P LOT 3D(GRID( − 5...5.,− 5...5.,[[− .2000000000000000, − .2000000000000000,− .2000000000000000],[ − .3000000000000000,− .3000000000000000, − .3000000000000000],[− .5999999999999999, − .5999999999999999,− .5999999999999999],[ − .2251799813685248 1016,− .2251799813685248 1016, 16 − .2251799813685248 10 ], [.6000000000000002, .6000000000000002, .6000000000000002 ] , [.3000000000000000, .3000000000000000, .3000000000000000 ] , [.2000000000000000, .2000000000000000, .2000000000000000 ] ],COLOR( RGB, 0,0,0)),AXESLABELS( x,y,z), AXESST Y LE( F RAM E ),TIT LE( ),P ROJ ECT ION (− 63.,73.,1))](diferencialni-pocet1098x.png) , způsobuje problémy (odlišnost grafu
a PC-grafu funkce). Z algoritmu realizace PC-grafu na
výstupním zařízení plyne i spojení těch funkčních hodnot, které by
neměly být spojeny (v okolí bodů nespojitosti, body
nespojitosti v tomto případě nejsou totožné s uzlovými
body). Z objektu PLOT3D je také
vidět, že při této hustotě sítě a stanovené přesnosti aproximace
jsou v PC-grafu potlačeny funkční hodnoty blízké +. Stačí však
změnit přesnost aproximace (změnou hodnoty proměnné Digits, implicitní nastavení je
Digits:=9), a dostáváme jinou síť
uzlových bodů a také jiný PC-graf (obr. 10.14):
, způsobuje problémy (odlišnost grafu
a PC-grafu funkce). Z algoritmu realizace PC-grafu na
výstupním zařízení plyne i spojení těch funkčních hodnot, které by
neměly být spojeny (v okolí bodů nespojitosti, body
nespojitosti v tomto případě nejsou totožné s uzlovými
body). Z objektu PLOT3D je také
vidět, že při této hustotě sítě a stanovené přesnosti aproximace
jsou v PC-grafu potlačeny funkční hodnoty blízké +. Stačí však
změnit přesnost aproximace (změnou hodnoty proměnné Digits, implicitní nastavení je
Digits:=9), a dostáváme jinou síť
uzlových bodů a také jiný PC-graf (obr. 10.14):
> plot3d(1/x, x=-5..5, y=-5..5, orientation=[-63,73],
> axes=framed,grid=[7,3],color=black,labels=[x,y,z]);
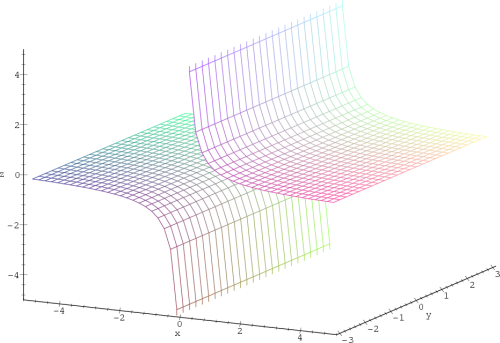
Omezíme tedy rozsah zobrazovaných hodnot
(view=-5..5) při původní přesnosti
aproximace (obr. 10.15
):
> Digits:=9:
> plot3d(1/x, x=-5..5, y=-5..5, view=-5..5,
> orientation=[-63,73], axes=framed, labels=[x,y,z]);
Na PC-grafu je vidět pozitivní vliv změny rozsahu
zobrazovaných hodnot, nadále však přetrvává spojování i těch bodů
PC-grafu, které spojeny být neměly. Skutečnosti odpovídající
PC-graf získáme následujícím způsobem. Tvorbu PC-grafu rozdělíme do
dvou částí tím, že definiční obor rozdělíme na dvě oblasti:
−5,
− 0.001−3,
3 a 0.001,
5−3,
3. Jednotlivé samostatně vytvářené části
PC-grafu v závěru interpretujeme
v jediném (obr. 10.16
) pomocí příkazu display3d z knihovny
plots:
> o1:=plot3d(1/x, x=-5..-0.001, y=-3..3, view=-5..5):
> o2:=plot3d(1/x, x=0.001..5, y=-3..3, view=-5..5):
> display3d({o1,o2}, orientation=[-63,73],axes=framed,
> labels=[x,y,z]);
Poznámka 10.1. Tvorba PC-grafu nespojité funkce jedné reálné proměnné je zjednodušena parametrem discont=true. Při použití tohoto parametru program nejprve určí body nespojitosti zadané funkce a poté rozdělí horizontální osu na intervaly, na kterých je tato funkce spojitá, takže nedojde ke spojení těch bodů PC-grafu, které spojeny být neměly.
V některých případech je vhodnější
nezobrazovat funkci ve tvaru explicitním, ale provést parametrizaci
funkce (x =  (u,v),
y =
(u,v),
y =  (u,v),
z =
(u,v),
z =  (u,v),
kde u a v jsou parametry). Výhodné je to zejména
u funkcí, které vykazují středovou nebo osovou symetrii.
(u,v),
kde u a v jsou parametry). Výhodné je to zejména
u funkcí, které vykazují středovou nebo osovou symetrii.
Příklad 10.4. Vytvořte PC-graf funkce

 2 −{[x,y] :
x2 +
y2 =
9}, tedy
rovina xy kromě bodů
ležících na kružnici se středem v bodě [0,0] a
poloměrem r = 3. V těchto bodech není funkce
spojitá. Pokud se pokusíme vytvořit PC-graf funkce jednoduchým
příkazem:
2 −{[x,y] :
x2 +
y2 =
9}, tedy
rovina xy kromě bodů
ležících na kružnici se středem v bodě [0,0] a
poloměrem r = 3. V těchto bodech není funkce
spojitá. Pokud se pokusíme vytvořit PC-graf funkce jednoduchým
příkazem:
> plot3d(f, x=-5..5, y=-5..5);
dostáváme obr. 10.17. Změna hustoty
uzlových bodů a omezení rozsahu zobrazovaných hodnot v tomto
případě nepomáhá (obr. 10.18
):
> plot3d(f, x=-5..5, y=-5..5, view=-5..5,grid=[30,40]);
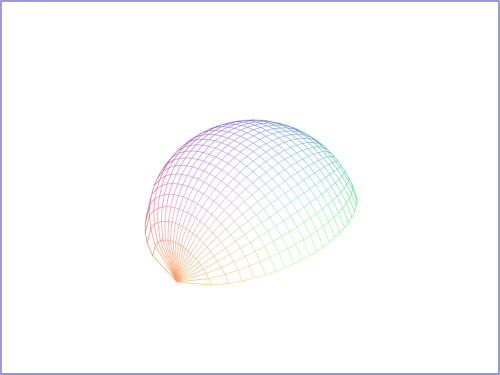
Proveďme nyní parametrizaci x =
ucosv,
y = usinv,
z =  a generujme PC-graf
(obr. 10.19
) této funkce:
a generujme PC-graf
(obr. 10.19
) této funkce:
> plot3d([u*cos(v), u*sin(v), subs({x=u*cos(v),
> y=u*sin(v)}, f)], v=0..2*Pi, u=0..6, view=-5..5):
Všimněme si rozdílu mezi PC-grafem funkce f (dané explicitně, obr. 10.17 a 10.18 ) a PC-grafem téže funkce dané parametricky (obr. 10.19 ) (graf by měl být v obou případech stejný).
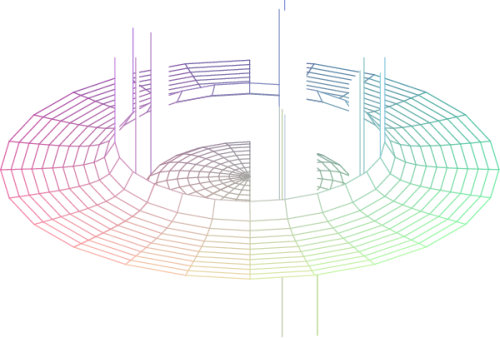
Protože získaný PC-graf stále neodpovídá grafu
funkce, rozdělíme tvorbu PC-grafu opět do dvou částí, přičemž
parametr u bude postupně
nabývat hodnot z intervalů 0,
2.999 a
3.001,
6:
> s1:=plot3d([u*cos(v), u*sin(v),
> subs({x=u*cos(v), y=u*sin(v)}, f)], v=0..2*Pi,
> u=0..2.999):
> s2:=plot3d([u*cos(v), u*sin(v),
> subs({x=u*cos(v), y=u*sin(v)}, f)], v=0..2*Pi,
> u=3.001..6):
> display3d({s1,s2}, view=-8..8);
> display3d({s1,s2}, view=-8..8, orientation=[40,102]);
Z důvodu názornosti je funkce zobrazena ze dvou různých pohledů (obr. 10.20 a obr. 10.21).
Všimněme si nyní ještě některých parametrů
příkazu plot3d, kterými můžeme ovlivnit
vzhled výsledného PC-grafu. Doposud jsme generovali PC-graf vždy
nad čtvercovou nebo obdélníkovou oblastí. Ale rozsah druhého
parametru může být udán v závislosti na prvním. Například při
generování PC-grafu povrchu polokoule nad čtvercovým oborem:
> plot3d(sqrt(1-x^2-y^2), x=-1..1, y=-1..1,
> scaling=constrained);
dostáváme PC-graf na obrázku 10.22. Získaný PC-graf neodpovídá na okrajích oblasti grafu funkce („zubaté okraje“ jsou opět způsobeny spojováním funkčních hodnot v uzlových bodech).
Při použití kruhové oblasti:
> plot3d(sqrt(1-x^2-y^2), x=-1..1,
> y=-sqrt(1-x^2)..sqrt(1-x^2), scaling=constrained);
(tj. proměnného rozsahu na ose y) dostáváme PC-graf odpovídající grafu funkce (obr. 10.23).
Rozsah zobrazovaných hodnot ve směru
osy z měníme volbou
parametru view=[zmin..zmax]. Pokud tento
parametr nezadáme, volí Maple rozsah zobrazovaných hodnot sám, což
opět může vést k zavádějícím výsledkům (viz také komentář
k příkladu 10.3
). Porovnejme dva PC-grafy
(obr. 10.24
a obr. 10.25), generované
příkazy:
> plot3d(1/(x^2+y^2), x=-1..1, y=-1..1, axes=boxed,
> color=black, labels=[x,y,z]);
> plot3d(1/(x^2+y^2), x=-1..1, y=-1..1, view=0..6,
> style=patch, axes=boxed, labels=[x,y,z]);
Pro zkoumanou funkci je lim(x,y)(0,0)1∕(x2
+ y2) =
+, rozsah zobrazovaných hodnot a
měřítka na osách v prvním případě Maple volil sám
(+ aproximoval hodnotou 7  1031).
Výsledný PC-graf (obr. 10.24
) pak neodpovídá grafu funkce. Obor
zobrazovaných hodnot tedy omezíme parametrem view=0..6 na interval 0,
6, získaný PC-graf je znázorněn
na obr. 10.25
.
1031).
Výsledný PC-graf (obr. 10.24
) pak neodpovídá grafu funkce. Obor
zobrazovaných hodnot tedy omezíme parametrem view=0..6 na interval 0,
6, získaný PC-graf je znázorněn
na obr. 10.25
.
Pro vytvoření představy o tvaru a průběhu znázorňované plochy nám často pomáhají vrstevnice (viz Definice 1.3 ) grafu funkce a řezy rovinami z = 0, y = 0, x = 0, příp. rovinami s nimi rovnoběžnými. Maple nám tak může pomoci při vysvětlování geometrického významu pojmu vrstevnice funkce a při jejich znázorňování.
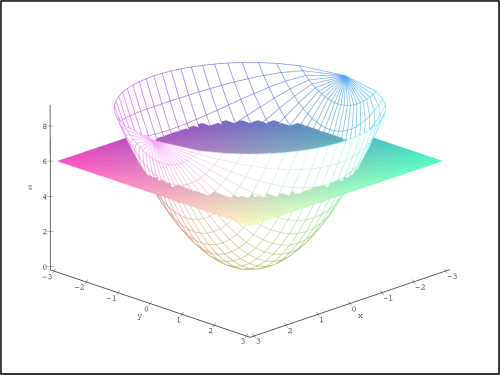
Ukažme si nyní konstrukci vrstevnice funkce f(x,y) = x2 + y2 na hladině c = 6. Nejdříve generujme PC-graf funkce f a označme jej P1 (obr. 10.26 ). Poté vytvořme PC-graf roviny z = 6, označíme jej P2, a interpretujme funkci i rovinu v jednom PC-grafu (obr. 10.27 ):
> with(plots):
> f := (x,y) -> x^2+y^2:
> P1 := plot3d(f(x,y), x=-3..3,
> y= -sqrt(9-x^2)..sqrt(9-x^2), axes=framed,
> tickmarks=[7,7,5], orientation=[45,60],
> labels=[x,y,z]): ";
> P2 := plot3d(6, x=-3..3, y= -3..3,
> style = patchnogrid):
> display3d({P1,P2}, axes=framed,tickmarks = [7,7,5],
> orientation=[45,60], labels=[x,y,z]);
Křivka, vzniklá jako průsečnice grafu funkce f a roviny z = 6 je dána parametricky rovnicemi
x
=  cost, y
=
cost, y
=  sint, z=6
sint, z=6
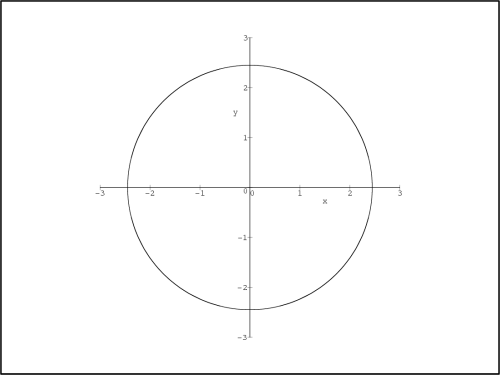
a představuje vrstevnici funkce f na hladině c = 6.
Znázornění vrstevnice v rovině získáme průmětem do roviny
xy. Situaci znázorňují
následující dva obrázky (obr. 10.28
, obr. 10.29). Pro vykreslení
prostorové křivky jsme použili procedury spacecurve z knihovny
plots:
> P3 := spacecurve([sqrt(6)*cos(t), sqrt(6)*sin(t),6],
> t=0..2*Pi, color=black, thickness=3):
> P4 := spacecurve([sqrt(6)*cos(t), sqrt(6)*sin(t),0],
> t=0..2*Pi, color=red, thickness=3):
> display3d({P1,P2,P3},tickmarks=[7,7,5],
> orientation = [40,120], axes=boxed, labels=[x,y,z]);
> display3d({P1,P2,P3,P4},tickmarks=[7,7,5],
> orientation =[40,120], axes=boxed, labels=[x,y,z]);
Podobným způsobem můžeme znázornit i řezy rovinami rovnoběžnými s rovinami xz a yz. Např. zobrazme průnik roviny x = 2 a grafu funkce f. Jako průsečnici získáme křivku, kterou můžeme popsat parametricky rovnicemi

> P2 := implicitplot3d(x=2,x=-3..3,y=-3..3,z=0..20,
> style=patchnogrid):
> P3 := spacecurve([2,t,j(2,t)],t=-3..3,thickness=3,
> color=black):
> display3d({P1,P2,P3},tickmarks=[7,7,5],
> axes=framed, orientation=[40,120], labels=[x,y,z]);
Pro přímé znázorňování vrstevnic používáme
příkaz contourplot (obr. 10.31):
> plots[contourplot](f(x,y), x=-3..3,
> y=-sqrt(9-x^2)..sqrt(9-x^2), axes=boxed, color=black,
> contours=10, numpoints=2500, scaling=constrained,
> tickmarks=[7,7,0]);
Parametr style=patchcontour příkazu
plot3d slouží k zobrazení
grafu funkce s vrstevnicemi (obr. 10.32) a pro zobrazení
vrstevnice na dané hladině můžeme použít příkazu levelcurve z knihovny
mvcalp (obr. 10.33):
> plot3d(f(x,y), x=-3..3, y=-sqrt(9-x^2)..sqrt(9-x^2),
> style=patchcontour, axes=boxed, orientation=[40,120],
> tickmarks=[7,7,5], labels=[x,y,z]);
> with(mvcalp):
> levelcurve(f(x,y),6, x=-3..3, y=-3..3, color=black,
> scaling=constrained, tickmarks=[7,7]);
Protože tvorba matematické grafiky není často jednoduchou záležitostí a vzhled výsledného PC-grafu můžeme ovlivňovat celou řadou parametrů, uvádíme na závěr této kapitoly i stručný přehled základních použitých příkazů a jejich parametrů. Popis všech příkazů čtenář najde buď v manuálech [C-G1], [C-G2] a [C-G3] nebo přímo v systému nápovědy programu Maple V.
Generování PC-grafu funkce dvou
proměnných:
plot3d(f(x,y),x=a..b,y=c..d,volby);
pro výrazy a plot3d(f, a..b,c..d, volby); pro funkce.
Volitelné parametry volby ovlivňují vzhled výsledného PC-grafu. Nejčastěji používané parametry jsou popsány Tabulce 10.1 .
|
Generování PC-grafu funkce dvou proměnných dané
parametricky (obr. 10.2
):
plot3d([f(s,t),g(s,t),h(s,t)],s=a..b,t=c..d,
volby);
K rozšíření možností práce s grafikou slouží knihovna
plots. Procedury této knihovny
zpřístupníme příkazem with(plots):
Vykreslení prostorové křivky (obr. 10.28 a 10.29):
spacecurve([f(t),g(t),h(t)],t=a..b,volby);
Znázornění vrstevnic (obr. 10.31
):
contourplot(f(x,y),x=a..b,y=c..d,volby);
Znázornění vrstevnice na dané hladině (obr. 10.33):
mvcalp[levelcurve](f(x,y), hladina, x=a..b,
y=c..d);
Generování PC-grafu funkce dané implicitně (obr. 10.30 a viz také
Kapitola 7
): implicitplot3d(expr1, x=a..b, y=c..d, z=p..q,
volby);
[Další] [Předchozí] [Předchozí – na konec] [Na začátek] [Výše]