In [4]:
from matplotlib import pyplot as plt
plt.plot(x,y,'d')
fun=lambda x:exp(-(x-3)**2+0.1*(x-3)**3)+0.4*exp(-(x-6)**2)
plt.plot(r_[:10:.1],fun(r_[:10:.1]))
plt.grid()

%matplotlib inline
from numpy import *
nen=30
x=r_[:10:1j*nen]+random.normal(size=nen)*0.1
y=exp(-(x-3)**2+0.1*(x-3)**3)+0.4*exp(-(x-6)**2)
y+=random.normal(size=nen)*0.1
y.max()
from matplotlib import pyplot as plt
plt.plot(x,y,'d')
fun=lambda x:exp(-(x-3)**2+0.1*(x-3)**3)+0.4*exp(-(x-6)**2)
plt.plot(r_[:10:.1],fun(r_[:10:.1]))
plt.grid()
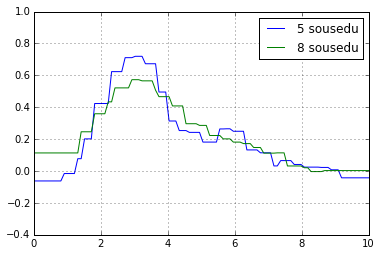
klouzavý průměr odpovídá konstantnímu kernelu
průměrování obecně
k=5
xf=r_[:10:100j]
vf=[]
vf8=[]
for f in xf:
ford=argsort(abs(f-x))
vf.append(y[ford[:5]].mean())
vf8.append(y[ford[:8]].mean())
plt.plot(xf,vf)
plt.plot(xf,vf8)
plt.legend(["5 sousedu","8 sousedu"])
plt.ylim(-0.4,1)
plt.grid()
nyní zkusíme "vážené" průměrování - kernel klesající se vzdáleností od středu
k=5
xf=r_[:10:100j]
kf=[]
kf1=[]
kf2=[]
for f in xf:
dist=abs(f-x)
ford=argsort(dist)
norm=exp(-dist[ford[:10]]**2/0.2)
norm/=norm.sum()
norm1=exp(-dist[ford[:10]]**2/0.4)
norm1/=norm1.sum()
norm2=(1-dist[ford[:10]])
norm2[norm2<0]=0
norm2/=norm2.sum()
kf.append((y[ford[:10]]*norm).sum())
kf1.append((y[ford[:10]]*norm1).sum())
kf2.append((y[ford[:10]]*norm2).sum())
#vf8.append(y[ford[:8]].mean())
plt.plot(xf,kf)
plt.plot(xf,kf1)
plt.plot(xf,kf2)
plt.legend(["gauss 0.1","gauss 0.2","triangl"])
plt.ylim(-0.4,1)
plt.grid()

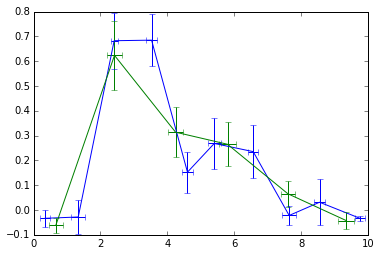
ymid=y.reshape(10,3).mean(1)
ystd=y.reshape(10,3).std(1)/sqrt(3)
xmid=x.reshape(10,3).mean(1)
xstd=x.reshape(10,3).std(1)/sqrt(3)
ymid2=y.reshape(6,5).mean(1)
ystd2=y.reshape(6,5).std(1)/sqrt(5)
xmid2=x.reshape(6,5).mean(1)
xstd2=x.reshape(6,5).std(1)/sqrt(5)
plt.errorbar(xmid,ymid,ystd,xstd)
plt.errorbar(xmid2,ymid2,ystd2,xstd2)
fun2=lambda p:p[0]+p[1]*exp(-(xc-3)**2)+p[2]*exp(-(xc-6)**2)
fun3=lambda p:p[0]+p[1]*exp(-(xc-3)**2+0.1*(xc-3)**3)+p[2]*exp(-(xc-6)**2)
fun3x=lambda p:p[0]+p[1]*exp(-(xc-3)**2+p[3]*(xc-3)**3)+p[2]*exp(-(xc-6)**2)
mat2=array([ones(x.shape),exp(-(x-3)**2),exp(-(x-6)**2)])
mat3=array([ones(x.shape),exp(-(x-3)**2+0.1*(x-3)**3),exp(-(x-6)**2)])
dcov2=linalg.inv(mat2.dot(mat2.T)) #hessian
dcov3=linalg.inv(mat3.dot(mat3.T))
dcov2.dot(mat2.dot(y)),dcov3.dot(mat3.dot(y))
pars2,pars3=dcov2.dot(mat2.dot(y)),dcov3.dot(mat3.dot(y))
plt.plot(x,y,'d')
xc=r_[:10:0.1]
plt.plot(xc,fun2(pars2))
plt.plot(xc,fun3(pars3))
plt.grid()

porovnání s nelineární optimalizací
from scipy import optimize
xc=x
minpars2=optimize.fmin(lambda p:((y-fun2(p))**2).sum(),[0,1,1])
minpars3=optimize.fmin(lambda p:((y-fun3(p))**2).sum(),[0,1,1])
pars2-minpars2,pars3-minpars3
minpars3x=optimize.fmin(lambda p:((y-fun3x(p))**2).sum(),[0,1,1,.3])
minpars3x
#skutecne reziduum
((y-fun(x))**2).sum()
mat1=array([exp(-(x-3)**2),exp(-(x-6)**2)])
dcov1=linalg.inv(mat1.dot(mat1.T))
pars1=dcov1.dot(mat1.dot(y))
pars1,((y-mat1.T.dot(pars1))**2).sum()
sqrt(dcov2.diagonal()),sqrt(dcov1.diagonal())