Lokalizace bodu
Úvod
Pro dané rovinné podrozdělení (mapu) chceme najít vyhledávací strukturu, která při zadání souřadnic bodu najde oblast, ve které bod leží. Idea algoritmu spočívá v tom, že si dané podrozdělení „zjemníme“ na tak zvanou lichoběžníkovou mapu a vyhledávací strukturu sestrojíme pro toto podrozdělení. Výhodou lichoběžníkové mapy je, že jednotlivé její oblasti jsou lichoběžníky a trojúhelníky (které lze považovat za deformované lichoběžníky)
a ty lze relativně jednoduše popsat pouze pomocí 4 údajů.
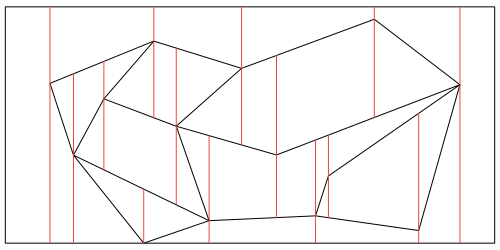
Obrázek 8.1
Vytvoření lichoběžníkové mapy.
Lichoběžníková mapa
Mějme rovinné podrozdělení (obvykle zadané pomocí dvojitě souvislého seznamu) ohraničené pravoúhelníkem $R$. Toto podrozdělení svými hranami určuje množinu úseček, které se neprotínají ve vnitřních bodech, ale mohou mít společné koncové body. Konstrukci lichoběžníkové mapy provedeme pro jakoukoliv množinu $n$ úseček
$$S=\{s_1,s_2,\dots.s_n\},$$
které leží v pravoúhelníku $R$.
Pro další výklad budeme předpokládat, že žádné dva koncové body těchto úseček nemají stejnou $x$-ovou souřadnici. Tento omezující předpoklad odstraníme později. Levý koncový bod úsečky
$s_i$ budeme značit $p_i$, pravý koncový bod $q_i$.
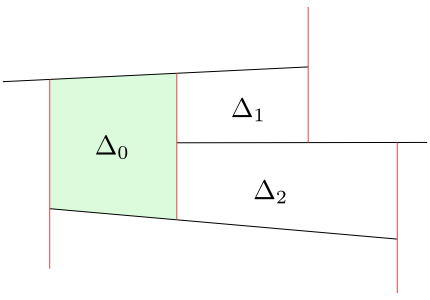
Lichoběžníkovou mapu $\mathcal T(S)$ sestrojíme tak, že každým koncovým bodem úsečky z množiny $S$ vedeme vertikální úsečku od nejbližší vyšší úsečky k nejbližší nižší úsečce, viz obrázek 8.2. Tím celý pravoúhelník $R$ rozdělíme na lichoběžníky a trojúhelníky.
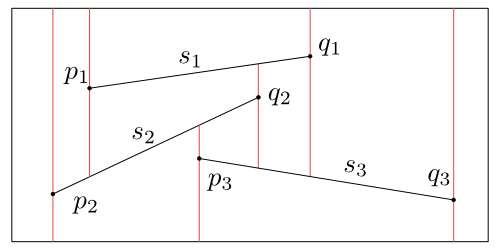
Obrázek 8.2
Lichoběžníková mapa pro tři úsečky.
Ukažme si, jak lichoběžníky a trojúhelníky z této mapy popsat pomocí úseček z množiny $S$ a jejich koncových bodů. Každý lichoběžník nebo trojúhelník $\Delta$ má dvě nevertikální strany, které jsou částí úseček z $S$ nebo částí horní nebo spodní strany pravoúhelníka $R$. Vrchní stranu tohoto lichoběžníku budeme označovat jako $\operatorname{top}(\Delta)$, spodní jako $\operatorname{bottom}(\Delta)$. Vertikální strany jsou určeny koncovými body $p_j$ nebo $q_j$ úseček z množiny $S$. V případě trojúhelníka přejde jedna z vertikálních stran do bodu. Proto je každý lichoběžník, resp.
trojúhelník $\Delta$ kromě horní a spodní strany určen bodem
$\operatorname{leftp}(\Delta)$, kterým vede levá vertikální strana, a bodem $\operatorname{rightp}(\Delta)$, kterým prochází pravá vertikální strana.
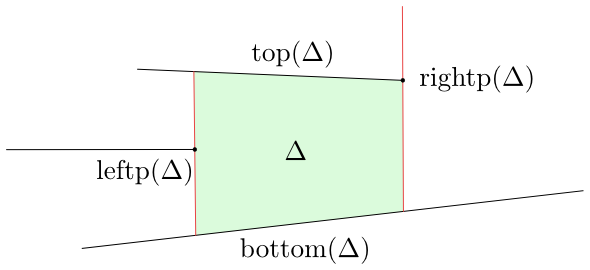
Obrázek 8.3
Popis lichoběžníku $\Delta$.
Podstatné je, že lichoběžníková mapa vytvořená pro $n$ úseček má řádově $n$ vrcholů a lichoběžníků.
Věta 8.1
Lichoběžníková mapa pro $n$ úseček má nejvýše $6n+4$ vrcholů a $3n+1$ lichoběžníků.
Důkaz
Celkový počet vrcholů lichoběžníkové mapy je dán vrcholy pravoúhelníka $R$ – ty jsou 4, koncovými body úseček – těch je nejvýše $2n$ a novými vrcholy, které byly vytvořeny nejvýše $2n$ vertikálami – těch je dvakrát tolik, kolik je vertikál, tedy nejvýše $4n$.
Dohromady tedy nejvýše $6n+4$.
Počet lichoběžníků zjistíme tak, že pro každý bod určíme maximální počet lichoběžníků $\Delta$, pro které je tento bod levým bodem $\operatorname{leftp}(\Delta)$. Pro levý dolní vrchol pravoúhelníku $R$ existuje právě jeden takový lichoběžník. Pro pravý koncový $q_i$ úsečky $s_i$ existuje rovněž jeden lichoběžník, pro levý koncový bod $p_i$ existují 2 lichoběžníky.
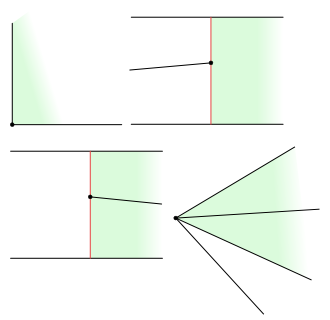
Obrázek 8.4
Počty lichoběžníků pro daný $\operatorname{leftp}$.
Vzhledem k tomu, že některé z koncových bodů úseček splývají (v takovém případě některé lichoběžníky započteme vícekrát), bude počet lichoběžníků nejvýše
$$1+n+2n=3n+1.$$
\(\Box\)
Vyhledávací struktura
Vyhledávací struktura pro lichoběžníkovou mapu $\mathcal T(S)$ slouží k určení lichoběžníku, v němž leží zadaný bod $r$, který neleží na žádné úsečce a jehož $x$-ová souřadnice je různá od $x$-ových souřadnic bodů $p_i$ a $q_i$. Je to orientovaný graf $\mathcal D(S)$ s těmito vlastnostmi:
- V listech tohoto grafu jsou všechny lichoběžníky z $\mathcal T(S)$.
- Z každého vnitřního uzlu vedou dvě hrany.
- Vnitřní uzly jsou dvojího typu.
- S prvým typem uzlů jsou svázány body $p_i$ a $q_i$. Z takového uzlu (označme jej na chvíli jako $p$) postupujeme vlevo, je-li pro $x$-ové souřadnice
$r_x\lt p_x$, a vpravo, je-li $r_x\gt p_x$.
- S druhým typem uzlů jsou spojeny úsečky $s_i$. Z takového uzlu postoupíme vlevo, jestliže
bod $r$ leží pod úsečkou $s_i$, a vpravo, je-li $r$ nad $s_i$.
Zatímco pro zadanou množinu $S$ je lichoběžníková mapa určena jednoznačně, tak vyhledávací struktura s výše uvedenými vlastnostmi určena jednoznačně není. Následující obrázky zachycují jednoduché příklady lichoběžníkových map a příslušných vyhledávacích struktur.
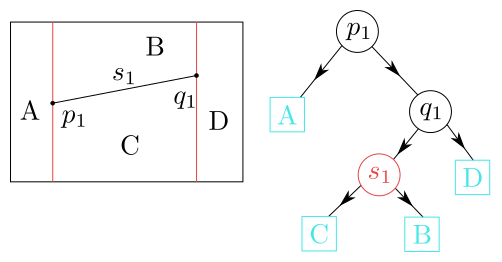
Obrázek 8.5
Lichoběžníková mapa a vyhledávací struktura pro 1 úsečku.
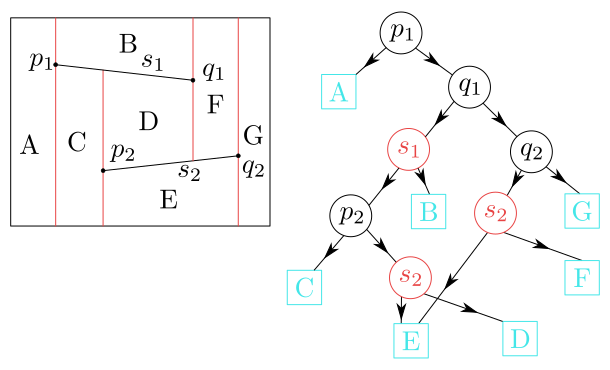
Obrázek 8.6
Lichoběžníková mapa a vyhledávací struktura pro 2 úsečky.
Délka cesty od kořene k listu odpovídá času pro vyhledání nějakého bodu v lichoběžníku, který danému listu odpovídá. Na obrázcích si všimněte podstatně odlišné délky cest k různým listům.
Náhodnostní přírůstkový algoritmus
Lichoběžníková mapa pro prázdnou množinu úseček je tvořena pouze pravoúhelníkem $R$, příslušná vyhledávací struktura obsahuje pouze jediný uzel a to list odpovídající pravoúhelníku $R$. Označíme-li
$$S_i=\{s_1,s_2,\dots,s_i\},$$
tak podstata algoritmu spočívá v tom, jak z lichoběžníkové mapy a vyhledávací struktury pro $i-1$ úseček z $S_{i-1}$ vytvořit lichoběžníkovou mapu $\mathcal T(S_i)$ a vyhledávací strukturu $\mathcal D(S_i)$ pro množinu úseček $S_i$. Vzhledem k tomu, že vyhledávací struktura závisí na pořadí úseček, bereme toto pořadí náhodně. Rámcově je algoritmus zachycen v následujícím pseudokódu:
Algorithm TrapezoidalMap($S$)
Input. A set $S$ of $n$ non-crossing line segments.
Output. The trapezoidal map $\mathcal T(S)$ and a search structure $\mathcal D$ for $\mathcal T(S)$ in a bounding box.
- Determine a bounding box $R$ that contains all segments of $S$, and initialize the trapezoidal map structure $\mathcal T$ and search structure $\mathcal D$ for it.
- Compute a random permutations $s_1, s_2,\ldots, s_n$ of the elements of $S$.
- for $i\leftarrow 1$ to $n$
- do Find the set $\Delta_0,\Delta_1,\ldots,\Delta_k$ of trapezoids in $\mathcal T$ properly intersected by $s_i$.
Remove $\Delta_0,\Delta_1,\ldots,\Delta_k$ from $\mathcal T$ and replace them by the new trapezoids that appear because of the insertion of $s_i$
Remove the leaves for $\Delta_0,\Delta_1,\ldots,\Delta_k$ from $\mathcal D$, and create leaves for the new trapezoids. Link the new leaves to the existing inner nodes by adding some new inner nodes, as explained below.
Sledování úsečky
Nyní si ukážeme, jak pracuje algoritmus stručně popsaný 4. řádkem předchozího pseudokódu. Mějme lichoběžníkovou mapu $\mathcal T$ a vyhledávací strukturu $\mathcal D$ pro množinu $S_{i-1}$. Do pravoúhelníka $R$ přidáme úsečku $s=s_i$
s levým krajním bodem $p$ a pravým krajním bodem $q$ a chceme najít lichoběžníky $\Delta_0$,
$\Delta_1$, $\dots,\ \Delta_k$, které úsečka $s$ protíná postupně zleva doprava.
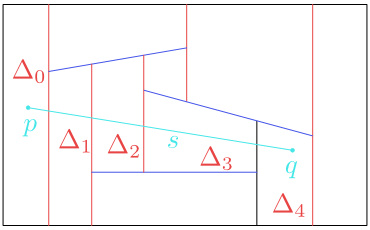
Obrázek 8.7
Úsečka $s$ prochází postupně lichoběžníky $\Delta_0, \Delta_1,\Delta_2,\Delta_3,\Delta_4$.
K popisu tohoto algoritmu budeme potřebovat pojem sousedních lichoběžníků a levého a pravého souseda. O dvou lichoběžnících prohlásíme, že jsou sousední, mají-li společnou část vertikální strany, která nedegeneruje do bodu.
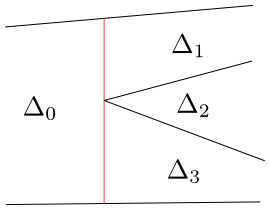
Obrázek 8.8
Dvojice lichoběžníků $\Delta_0$ a $\Delta_1$, $\Delta_0$ a $\Delta_3$ jsou sousední, zatímco dvojice $\Delta_0$ a $\Delta_2$ nebo $\Delta_1$ a $\Delta_2$ sousední nejsou.
Mají-li dva sousední lichoběžníky společnou spodní stranu, řekneme, že jeden je (levým nebo pravým) dolním sousedem druhého. Mají-li společnou horní stranu, řekneme, že jeden je (levým nebo pravým) horním sousedem druhého.
Obrázek 8.9
Lichoběžník $\Delta_1$ je pravým horním sousedem lichoběžníku $\Delta_0$. Lichoběžník $\Delta_0$ je levým dolním sousedem lichoběžníku $\Delta_2$.
Algoritmus najde prvně lichoběžník $\Delta_0$, ve kterém leží levý krajní bod $p$ úsečky $s$.
Jestliže bod $p$ není levým koncovým bodem žádné úsečky z $S_{i-1}$, stačí k nalezení $\Delta_0$ použít vyhledávací strukturu $\mathcal D$. Jestliže je $p$ je levým koncovým bodem
jedné nebo více úseček z $S_{i-1}$, leží vpravo od něj více lichoběžníků a my si z nich musíme
vybrat ten, kterým prochází úsečka $s$. To provedeme porovnáním směrnic těchto úseček se směrnicí úsečky $s$. Směrnice této úsečky s krajními body $p$ a $q$ je rovna podílu rozdílů $y$-ových a $x$-ových souřadnic
$$\frac{q_y-p_y}{q_x-p_x}.$$
Hledaný lichoběžník $\Delta_0$ se vyznačuje tím, že směrnice jeho horní strany je větší než směrnice úsečky $s$ a ta je větší než směrnice jeho spodní strany.
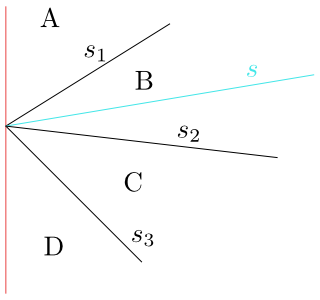
Obrázek 8.10
Směrnice úsečky $s_1$ $>$ směrnice $s$ $>$ směrnice $s_2$. Hledaným lichoběžníkem $\Delta_0$ je lichoběžník $B$.
Jestliže bod $q$ leží vlevo od $\operatorname{rightp}(\Delta_0)$, leží v $\Delta_0$ celá úsečka $s$.
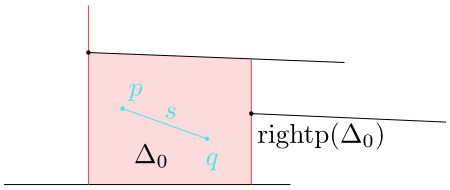
Obrázek 8.11
Celá úsečka $s$ leží v $\Delta_0$.
Jestliže bod $q$ leží vpravo od $\operatorname{rightp}(\Delta_0)$, protíná úsečka $s$ ještě další lichoběžník $\Delta_1$. Tímto lichoběžníkem je dolní pravý soused lichoběžníku $\Delta_0$, jestliže
$\operatorname{rightp}(\Delta_0)$ leží nad $s$, a pravý horní soused, pokud $\operatorname{rightp}(\Delta_0)$ leží pod $s$, viz následující obrázek.
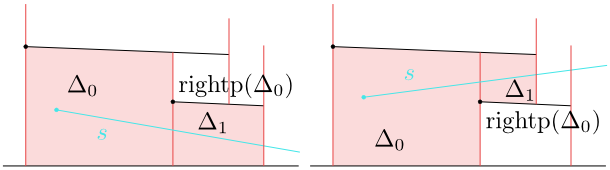
Obrázek 8.12
Určení $\Delta_1$ podle vzájemné polohy úsečky $s$ a bodu $\operatorname{rightp}(\Delta_0)$.
Stejným způsobem postupujeme dále, jak zachycuje následující pseudokód:
Algorithm FollowSegment($\mathcal T,\mathcal D,\mathcal s_i$)
Input. A trapezoidal map $\mathcal T$, a search structure $\mathcal D$ for $\mathcal T$, and a new segment $s_i$.
Output. The sequence $\Delta_0,\ldots,\Delta_k$ of trapezoids intersected by $s_i$
- Let $p$ and $q$ be the left and right endpoint of $s_i$.
- Search with $p$ in the search structure $\mathcal D$ to find $\Delta_0$.
- $j\leftarrow 0$;
- while $q$ lies to the right of $\operatorname{rightp}(\Delta_j)$
- do if $\operatorname{rightp}(\Delta_j)$ lies above $s_i$.
- then Let $\Delta_{j+1}$ be the lower right neighbor of $\Delta_j$.
- else Let $\Delta_{j+1}$ be the upper right neighbor of $\Delta_j$.
- $j\leftarrow j + 1$
- return $\Delta_0, \Delta_1,\ldots, \Delta_j$
Nahrazení protínaných lichoběžníků novými a modifikace vyhledávací struktury
V této části si ukážeme základní myšlenku algoritmu, který realizuje 5. a 6. řádek algoritmu TrapezoidalMap, tj. jak lichoběžníky
$\Delta_0$, $\Delta_1$, $\dots,\ \Delta_k$ protínané úsečkou $s=s_i$ nahradíme v lichoběžníkové mapě $\mathcal T$ novými lichoběžníky a jak změníme vyhledávací strukturu
$\mathcal D$
Předpokládejme prvně, že úsečka $s$ leží celá uvnitř jediného lichoběžníku $\Delta_0$.
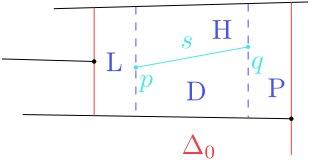
Obrázek 8.13
Úsečka $s$ leží celá v lichoběžníku $\Delta_0$.
V tomto případě je lichoběžník $\Delta_0$ v $\mathcal T$ nahrazen lichoběžníky
$L$, $H$, $D$ a $P$. Každý z těchto lichoběžníků je určen svou horní a dolní stranou a pravým a levým bodem. Například pro lichoběžník $H$ je
$$\operatorname{top}(H)=\operatorname{top}(\Delta_0), \ \operatorname{bottom}(H)=s, \ \operatorname{leftp}(H)=p, \ \operatorname{rightp}(H)=q.$$
Modifikaci vyhledávací struktury provedeme tak, jak je ukázáno na následujícím obrázku.
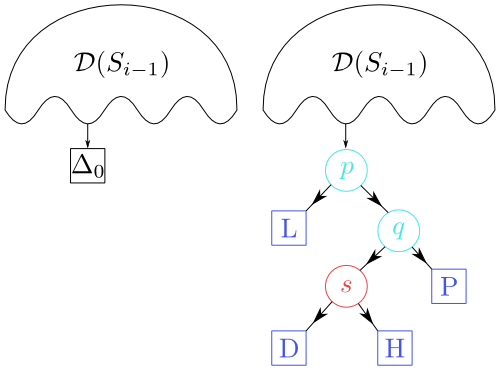
Obrázek 8.14
Přechod od $\mathcal D(S_{i-1})$ k $\mathcal D(S_i)$.
Nechť nyní úsečka $s$ protíná více mnohoúhelníků. Pro názornost uvažujme situaci znázorněnou na prvním z následujících dvou obrázků
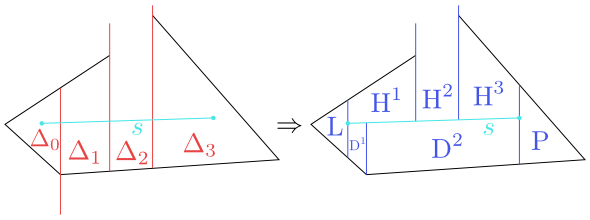
Obrázek 8.15
Přechod od $\mathcal T(S_{i-1})$ k $\mathcal T(S_i)$.
Nahrazení lichoběžníků $\Delta_0$, $\Delta_1$, $\Delta_2$, $\Delta_3$ novými lichoběžníky
provedeme takto. $L$ je lichoběžník ležící vlevo od bodu $p$, má stejné $\operatorname{top}$, $\operatorname{bottom}$ a $\operatorname{leftp}$ jako $\Delta_0$. Protože $\operatorname{rightp}(\Delta_0)$ leží pod $s$, je dalším lichoběžníkem $D^1$ s
$$\operatorname{leftp}(D^1)=p, \ \operatorname{rightp}(D^1)=\operatorname{rightp}(\Delta_0), \ \operatorname{top}(D^1)=s,\ \operatorname{bottom}(D^1)=\operatorname{bottom}(\Delta_0).$$
Pravý bod lichoběžníku $\Delta_1$ leží nad $s$, proto další lichoběžník leží nad $s$. Označme ho jako $H^1$. Je určen těmito údaji
$$\operatorname{leftp}(H^1)=p, \ \operatorname{bottom}(H^1)=s, \ \operatorname{top}(H^1)=\operatorname{top}(\Delta_1), \ \operatorname{rightp}(H^1)=\operatorname{rightp}(\Delta_1).$$
Pravý bod lichoběžníku $\Delta_2$ leží opět nad $s$, proto také další lichoběžník $H^2$ bude nad $s$ a přitom
$$\operatorname{leftp}(H^2)=\operatorname{rightp}(\Delta_1), \ \operatorname{bottom}(H^2)=s, \ \operatorname{top}(H^2)=\operatorname{top}(\Delta_2), \operatorname{rightp}(H^2)=\operatorname{rightp}(\Delta_2).$$
Protože v dalším lichoběžníku $\Delta_3$ leží pravý koncový bod $q$ úsečky $s$, doplníme seznam nových lichoběžníků o lichoběžník $D^2$ ležící pod $s$ s pravým bodem $q$, o lichoběžník $H^3$ ležící nad $s$ s pravým bodem $q$ a o lichoběžník $P$ ležící vpravo od bodu
$q$.
Modifikaci vyhledávací struktury znázorňuje následující obrázek.
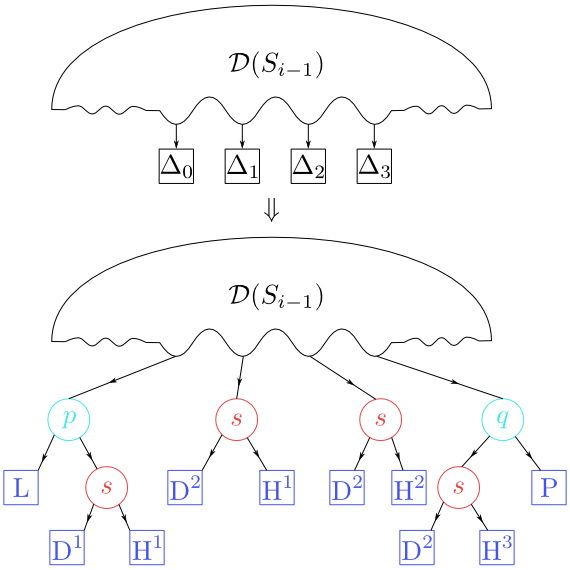
Obrázek 8.16
Přechod od $\mathcal D(S_{i-1})$ k $\mathcal D(S_i)$.
Pseudokódy pro aktualizaci lichoběžníkové mapy $\mathcal T$ a vyhledávací struktury
$\mathcal D$ nebudeme explicitně uvádět. Čtenář si je může na základě předchozích úvah napsat již sám nebo se na ně podívat do bakalářské práce Ondřeje Folvarčného
http://is.muni.cz/auth/th/211164/prif_b/BP.pdf?lang=cs
na stranách 20 a 21.
Odstranění zjednodušujících předpokladů
Zjednodušení spočívalo v tom, že různé koncové body úseček a vyhledávaný bod $r$ měly různé $x$-ové souřadnice. Tento předpoklad odstraníme zavedením transformace souřadnic (shear transformation)
$$\varphi(x,y)=(x+\varepsilon y,y)$$
pro malé $\varepsilon>0$.
Lemma 8.2
Pro konečnou množinu bodů $P$ existuje $\varepsilon>0$ tak, že pro každé dva různé body $p,q\in P$ platí
- $\varphi(p)_x\ne\varphi(q)_x$,
- $p_x\lt q_x\ \Rightarrow \ \varphi(p)_x\lt\varphi(q)_x$.
Důkaz
Nechť $p_x\lt q_x$. Je-li $p_y\le q_y$, pak nerovnost $ \varphi(p)_x\lt\varphi(q)_x$ platí pro všechna $\varepsilon \gt 0$.
Jeli $p_y\gt q_y$, pak nerovnost $ \varphi(p)_x\lt\varphi(q)_x$ platí právě když
$$0\lt\varepsilon\lt \frac{q_x-p_x}{p_y-q_y}.$$
Vzhledem k tomu, že body $p$, $q$ vybíráme z konečné množiny, lze dostatečně malé
kladné $\varepsilon$ splňující tvrzení lemmatu najít.
Jestliže nyní pro dva různé body $p$ a $q$ je $p_x=q_x$, musí být $p_y\ne q_y$ a tedy
také $\varphi(p)_x\ne\varphi(q)_x$.
\(\Box\)
Nyní bychom tedy mohli v předchozích úvahách nahradit uspořádání podle $x$-ové souřadnice uspořádáním podle $x$-ové souřadnice $\varphi$. Ve skutečnosti však žádné $\varepsilon$ pro určení transformace $\varphi$ není potřeba počítat.
Lemma 8.3
Pro každou konečnou množinu bodů $P$ a dostatečně malé $\varepsilon\gt 0$ je uspořádání bodů $p\in P$ podle $x$-ové souřadnice bodů $\varphi(p)$ stejné jako lexikografické uspořádání bodů $p$ nejdříve podle $x$-ové souřadnice a pak podle $y$-ové souřadnice.
Důkaz
Nechť $p\lt q$ v lexikografickém uspořádání. Pak buď $p_x\lt q_x$ a podle předchozího je $\varphi(p)_x\lt \varphi(q)_x$ nebo $p_x=q_x$ a $p_y\lt q_y$ a je rovněž
$\varphi(p)_x\lt\varphi(q)_x$.
\(\Box\)
Z předchozích úvah můžeme učinit tento praktický závěr: Kdykoliv v předchozích úvahách zjišťujeme, zda je bod vlevo či vpravo od jiného bodu, použijeme lexikografické uspořádání. Kdykoliv zjišťujeme zda nějaký bod leží nad nebo pod nějakou úsečkou, použijeme uspořádání podle $y$-ové souřadnice.
Odhady složitosti
Vzhledem k tomu, že náš algoritmus je náhodnostní, provedeme odhad očekávané náročnosti jednak na čas konstrukce vyhledávací struktury, jednak na paměť potřebnou pro uložení vyhledávací struktury a konečně na čas vyhledávání bodu pomocí této vyhledávací struktury. Začneme posledním údajem.
Věta 8.4
Očekávaný čas vyhledávání ve struktuře $\mathcal D$ vytvořené náhodným uspořádáním úseček
je $O(\log n)$.
Důkaz
Vyhledávací strukturu $\mathcal D$ vytvoříme v $n$ krocích. Nechť $X_i$ je počet uzlů na cestě při vyhledávání bodu $r$, které byly přidány v $i$-tém kroku. Z toho, jak jsme modifikovali vyhledávací strukturu (viz obrázky 8.14 a 8.16) je vidět, že
$$0\le X_i\le 3.$$
Považujme $X_i$ za náhodnou veličinu. Potom očekávaný čas vyhledávání je
$$E\left(\sum_{i=1}^n X_i\right)=\sum_{i=1}^n E(X_i)\le 3\cdot\operatorname{pravděpodobnost}(X_i\ne 0).$$
Skutečnost, že $X_i\ne 0$ znamená, že vyhledávaný bod $r$ leží v $\mathcal T(S_i)$ v nějakém
lichoběžníku $\Delta$, který vznikl právě v $i$-tém kroku při přidání úsečky $s_i$. To znamená, že nastane aspoň jedna z následujících možností:
$$\operatorname{top}(\Delta)=s_i,\ \operatorname{bottom}(\Delta)=s_i,\\ \operatorname{leftp}(\Delta)=p_i\ \text{nebo}\ q_i,\ \operatorname{rightp}(\Delta)=p_i\ \text{nebo}\ q_i.$$
Pravděpodobnost, že aspoň jedna z těchto možností nastane je nejvýše
$4/i$. Očekávaný čas vyhledávání je tedy shora odhadnut součtem
$$3\left(\sum_{i=1}^n \frac{4}{i}\right)=12\left(1+\sum_{i=2}^n\frac{1}{i}\right)\le 12\left(1+\int_1^n \frac{dx}{x}\right)=12(1+\log n)\\=O(\log n).$$
Prostřední odhad pomocí integrálu plyne z toho, že součet obsahů obdélníků o stranách
$1$ a $1/i$ pro $i=2,3,\dots,n$ je menší než obsah oblasti mezi osou $x$ a grafem funkce $1/x$
mezi čísly $1$ a $n$ na ose $x$, viz obrázek.
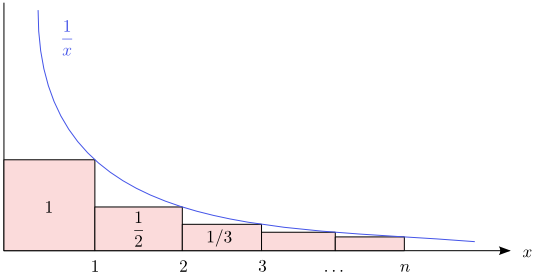
Obrázek 8.17
Porovnání součtu $\frac{1}{2}+\frac{1}{3}+\dots +\frac{1}{n}$ s integrálem $\int_{1}^{n}\frac{dx}{x}$.
\(\Box\)
Věta 8.5
Očekávaná velikost datové struktury je $O(n)$.
Důkaz
Velikost datové struktury je
$$\text{počet listů} + \sum_{i=1}^n \text{počet vnitřních uzlů vytvořených v kroku}\ i.$$
Nechť $u_i$ je počet lichoběžníků vzniklých přidáním úsečky $s_i$ v $i$-tém kroku. Na obrázcích
8.13, 14, 15, 16 se můžete přesvědčit, že počet nově vytvořených vnitřních uzlů v $i$-tém kroku je $u_i-1$.
To lze dokázat indukcí tak, jak je to uděláno na straně 29 bakalářské práce O. Folvarčného. Považujeme-li tedy $u_i$ za náhodnou veličinu, můžeme očekávanou velikost datové struktury odhadnout shora výrazem
$$O(n)+\sum_{i=1}^n E(u_i).$$
K dokončení důkazu nám teď stačí dokázat, že $E(u_i)=O(1)$.
Nechť $\Delta\in \mathcal T(S_i)$ je nějaký lichoběžník a $s\in S_i$ jedna z úseček. Položme
\begin{equation*}
\lambda(\Delta,s) =
\begin{cases}
1, &\text{jestliže $\Delta$ vznikl přidáním $s$,}\\
0, &\text{v opačném případě.}
\end{cases}
\end{equation*}
Protože je lichoběžník $\Delta$ určen nejvýše 4 úsečkami z $S$, je
$$\sum_{s\in S_i}\lambda(\Delta,s)\le 4,$$
a proto
$$\sum_{s\in S_i}\sum_{\Delta\in\mathcal T(S_i)}\lambda(\Delta,s)\le 4|\mathcal T(S_i)|\le 4(3i+1)=O(i).$$
Zde $|\mathcal T(S_i)|$ je počet lichoběžníků v $\mathcal T(S_i)$, který jsme ve větě 8.1 odhadli číslem $3i+1$. Nyní si stačí uvědomit, že číslo
$$\sum_{\Delta\in\mathcal T(S_i)}\lambda(\Delta,s_i)$$
udává počet lichoběžníků vzniklých v kroku $i$. Proto
$$E(u_i)=\frac{1}{i}\left(\sum_{s\in S_i}\Bigl(\sum_{\Delta\in\mathcal T(S_i)}\lambda(\Delta,s)\Bigr)\right)=\frac{O(i)}{i}=O(1).$$
\(\Box\)
Věta 8.6
Očekávaný čas konstrukce je $O(n\log n)$.
Důkaz
Čas pro vytvoření $\mathcal T(S_i)$ a $\mathcal D(S_i)$ z $\mathcal T(S_{i-1})$ a z $\mathcal D(S_{i-1})$ je $O(u_i)$ plus čas k vyhledání, v kterém lichoběžníku z $\mathcal T(S_{i-1})$ leží levý koncový bod $p_i$ úsečky $s_i$. Jeho očekávanou hodnotu můžeme tedy na základě předchozích výpočtů odhadnout takto:
$$\sum_{i=1}^n\bigl(O(E(u_i))+O(\log i)\bigr)=O(n)+O\Bigl(\sum_{i=1}^n\log i\Bigr)\le O(n)+O(n\log n)\\=O(n\log n).$$
\(\Box\)